
Un motor electric, cunoscut și sub denumirea de electromotor, este un dispozitiv electromecanic ingenios, conceput pentru a transforma energia electrică în energie mecanică. Transformarea inversă, de la energie mecanică la energie electrică, este realizată de un generator electric. Majoritatea motoarelor electrice își bazează funcționarea pe principiul forțelor electromagnetice, care acționează asupra unui conductor parcurs de curent electric aflat într-un câmp magnetic.
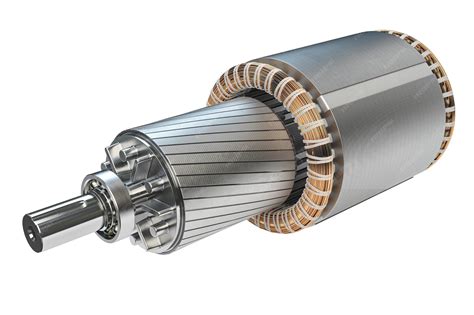
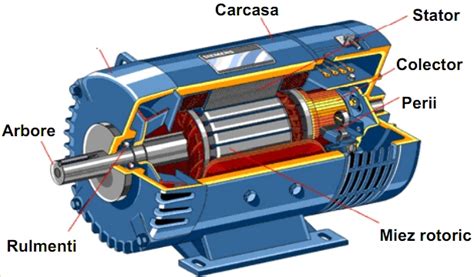
Indiferent de tipul specific, un motor electric este compus din două elemente fundamentale: statorul și rotorul. Statorul reprezintă partea fixă a motorului, de obicei cea exterioară, care include carcasa, bornele de alimentare, armătura feromagnetică statică și înfășurarea statică. Rotorul, pe de altă parte, este partea mobilă, amplasată de regulă în interiorul statorului. Acesta este format dintr-un ax și o armătură rotorică, pe care se află înfășurarea rotorică. Între aceste două componente, statorul și rotorul, există un spațiu de aer numit întrefier, esențial pentru a permite mișcarea rotorului față de stator.
Motoarele electrice pot fi clasificate în două mari categorii, în funcție de tipul curentului electric care le alimentează: motoare de curent continuu (CC) și motoare de curent alternativ (CA). Motorul de curent continuu, inventat în 1873 de Zénobe Gramme, funcționează pe baza unui curent ce nu-și schimbă direcția. Acest tip de motor are pe stator polii magnetici și bobinele polare concentrate, care generează câmpul magnetic de excitație. Când înfășurarea rotorică este parcursă de curent, se formează una sau mai multe perechi de poli magnetici echivalenți. Rotorul se deplasează în câmpul magnetic de excitație până când polii săi se aliniază cu polii statorici opuși.
Turația unui motor de curent continuu este direct proporțională cu tensiunea aplicată înfășurării rotorice și invers proporțională cu intensitatea câmpului magnetic de excitație. Reglarea turației se realizează prin variația tensiunii aplicate motorului, ajustată până la valoarea nominală. Turații mai mari se pot obține prin diminuarea câmpului de excitație. Cuplul dezvoltat de motor este direct proporțional cu curentul electric prin rotor și cu câmpul magnetic de excitație. Prin urmare, reglarea turației prin slăbirea câmpului duce la o diminuare a cuplului dezvoltat.
La motoarele serie, același curent străbate atât înfășurarea de excitație, cât și înfășurarea rotorică. Această caracteristică implică faptul că, pentru sarcini reduse, cuplul motorului depinde de pătratul curentului electric absorbit. Un aspect crucial este că motorul serie nu trebuie lăsat să funcționeze în gol, deoarece în această situație curentul absorbit este foarte redus, câmpul de excitație scade, iar motorul se poate "ambala" până la autodistrugere. Schimbarea sensului de rotație se poate realiza fie prin inversarea polarității tensiunii de alimentare, fie prin schimbarea sensului câmpului magnetic de excitație. La motorul serie, inversarea polarității tensiunii de alimentare influențează ambele mărimi, menținând sensul de rotație neschimbat. Din acest motiv, motorul serie poate funcționa și la tensiune alternativă.
Motoarele de curent alternativ funcționează pe baza principiului câmpului magnetic învârtitor, concept identificat de Nikola Tesla în 1882. Un an mai târziu, el a proiectat un motor de inducție bifazat, punând bazele mașinilor electrice moderne. Ulterior, sistemele de transmisie prin curent alternativ au revoluționat generarea și transmiterea energiei electrice pe distanțe mari, marcând a doua Revoluție Industrială.
Mașinile electrice asincrone sunt cele mai răspândite în acționările electrice cu curent alternativ. O caracteristică definitorie a acestora este faptul că viteza lor de rotație diferă ușor de viteza câmpului învârtitor, de unde și denumirea de "asincrone". Acestea pot funcționa atât în regim de motor, cât și, mai rar, în regim de generator. Viteza lor scade ușor odată cu creșterea sarcinii, motiv pentru care caracteristica lor mecanică este denumită "caracteristică tip derivație".
Motorul de inducție trifazat, cunoscut și sub denumirea de motor asincron trifazat, este cel mai frecvent utilizat în acționările electrice de puteri medii și mari. Statorul acestui motor este alcătuit dintr-o armătură feromagnetică pe care se află înfășurarea trifazată, responsabilă de crearea câmpului magnetic învârtitor. Rotorul, la rândul său, este format dintr-o armătură feromagnetică ce adăpostește înfășurarea rotorică. Există două tipuri principale de rotoare: rotorul bobinat, unde capetele înfășurării trifazate sunt conectate la inele colectoare, și rotorul în colivie.
În cazul rotorului bobinat, prin inducție electromagnetică, câmpul magnetic învârtitor induce o tensiune în înfășurarea rotorică. Această tensiune generează un curent electric, iar interacțiunea cu câmpul magnetic produce o forță electromagnetică ce pune rotorul în mișcare, urmând sensul câmpului învârtitor. Motorul este numit asincron deoarece turația rotorului este întotdeauna inferioară turației câmpului magnetic învârtitor, numită și turație de sincronism. Alunecarea, diferența relativă dintre turația de sincronism și turația rotorului, este aproape nulă la mersul în gol și egală cu 1 la pornire sau când rotorul este blocat. Cu cât alunecarea este mai mare, cu atât curenții induși în rotor sunt mai intenși.
Curentul absorbit la pornirea prin conectare directă a unui motor de inducție de putere medie sau mare poate fi comparabil cu un curent de avarie, ceea ce poate declanșa sistemele de protecție. Pentru a limita acest curent, se poate crește rezistența înfășurării rotorice (prin montarea unui reostat, doar la motoarele cu rotor bobinat) sau se poate reduce tensiunea aplicată motorului, utilizând un autotransformator, un variator de tensiune alternativă (pornire lină), conexiunea stea-triunghi (pentru motoarele destinate funcționării în triunghi) sau prin înserierea unor rezistoare la înfășurarea statorică.
Turația mașinii de inducție poate fi modificată prin variația alunecării sau a turației câmpului magnetic învârtitor. Alunecarea poate fi ajustată prin modificarea tensiunii de alimentare și a rezistenței rotorice. Creșterea rezistenței rotorice, deși permite reglarea turației, duce la creșterea pierderilor în rotor și la scăderea randamentului. O metodă avansată de reglare a turației implică utilizarea cascadelor de recuperare a puterii de alunecare. Acestea pot fi mecanice (cascada Krämmer cu recuperare mecanică), unde un motor de curent continuu antrenat de rotorul motorului de inducție preia puterea de alunecare, sau electrice, utilizând un invertor cu tiristoare și un transformator de adaptare pentru reintroducerea energiei în rețea.
Turația câmpului magnetic învârtitor poate fi modificată prin variația frecvenței tensiunii de alimentare sau a numărului de perechi de poli ai mașinii. Numărul de poli se poate schimba cu ajutorul unei înfășurări speciale (Dahlander) și al contactoarelor, în timp ce frecvența se ajustează cu ajutorul invertoarelor. Pentru frecvențe inferioare celei nominale, se menține constant raportul U/f (tensiune/frecvență).
Sensul de rotație al motorului de inducție se inversează prin schimbarea sensului câmpului învârtitor. Motorul de inducție cu rotorul în colivie este preferat datorită costului redus și fiabilității sporite comparativ cu cel cu rotor bobinat, eliminând necesitatea întreținerii periilor și a colectorului, precum și dezavantajele asociate acestora (zgomot, scântei, poluare electromagnetică).
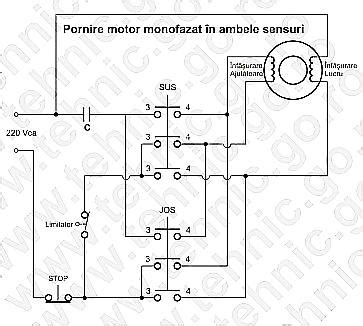
În cazul în care sistemul trifazat nu este disponibil, cum ar fi în aplicațiile casnice, se poate utiliza un motor de inducție monofazat. Curentul monofazat produce un câmp magnetic pulsatoriu, nu învârtitor, care nu poate porni rotorul direct. Pentru a genera un câmp magnetic învârtitor, se utilizează o fază auxiliară, înseriată cu un condensator, plasată pe stator la un unghi de 90°. După pornire, faza auxiliară este deconectată printr-un întrerupător centrifugal. Alternativ, se poate folosi o spiră în scurtcircuit pe unii poli statorici.
Servomotorul asincron monofazat este o mașină de inducție cu două înfășurări (de comandă și de excitație), dispuse la 90° una față de cealaltă, pentru a crea câmpul magnetic învârtitor. Rotorul acestuia are o rezistență ridicată, asigurând autofrânarea la anularea tensiunii pe înfășurarea de comandă.
Motorul sincron trifazat se distinge prin faptul că turația rotorului este identică cu turația câmpului magnetic învârtitor, indiferent de sarcină. Statorul său este similar cu cel al motorului de inducție, în timp ce rotorul este echipat cu o înfășurare de curent continuu. Există două tipuri constructive de rotoare sincrone: cu poli înecați (pentru turații mari) și cu poli aparenți (pentru turații mai reduse). Accesul la înfășurarea rotorică se face printr-un sistem inel-perie. Câmpul magnetic fix creat de înfășurarea rotorică se "lipește" de câmpul magnetic învârtitor statoric, determinând rotația sincronă. Datorită inerției, motorul sincron nu poate porni prin conectare directă la rețea, necesitând metode speciale de pornire, precum pornirea la frecvență variabilă sau utilizarea unui motor auxiliar.
Similar motoarelor de inducție monofazate, motoarele sincrone monofazate necesită un câmp magnetic învârtitor, obținut prin utilizarea unei faze auxiliare cu condensator sau a unei spirle în scurtcircuit.
Motorul pas cu pas este un tip de motor sincron cu poli aparenți pe ambele armături. Acesta se deplasează "pas cu pas", aliniindu-și polii rotorici cu cei statorici opuși, la primirea unui semnal de comandă. Controlul electronic permite obținerea unor deplasări precise, conform programului de comandă.

Turația motorului, măsurată în rotații pe minut (rpm), reprezintă numărul de rotații efectuate de arborele cotit într-un minut. Menținerea unui nivel optim al turațiilor prelungește durata de viață a motorului și asigură utilizarea eficientă a puterii disponibile. Senzorul de turație joacă un rol esențial în monitorizarea precisă a vitezei de rotație a arborelui cotit, fiind vital pentru funcționarea corectă a motorului. El ajută la identificarea arderilor incomplete sau inexistente în cilindri, prevenind griparea și uzura prematură a motorului.
Există diferențe semnificative între motoarele pe benzină și cele diesel în ceea ce privește turația. Motoarele pe benzină pot funcționa la turații mult mai mari, în timp ce motoarele diesel sunt caracterizate de turații mici și cuplu mare. Pentru motoarele pe benzină, schimbarea vitezei se recomandă, în condiții normale, la aproximativ 2500 rpm, dar poate depăși 4000 rpm în cazul depășirilor sau condusului agresiv. Motoarele diesel, pe de altă parte, necesită menținerea unei turații între 1800 și 3000 rpm pentru a evita deteriorarea componentelor, cum ar fi catalizatorul sau supapa EGR. Subturarea constantă a unui motor diesel poate afecta negativ ambreiajul, cutia de viteze și alte componente.
Este important de menționat că, în cazul motoarelor pe benzină dotate cu turbină, acestea trebuie turate doar după un minut de la pornire, pentru a permite ungerea corespunzătoare a turbosuflantei. De asemenea, după un rulaj prelungit la turații ridicate, motoarele diesel nu trebuie oprite imediat, ci lăsate să funcționeze la relanti cel puțin un minut pentru a permite răcirea turbinei.
Identificarea și verificarea înfășurărilor MOTOARELOR electrice
În concluzie, înțelegerea principiilor de funcționare și a specificităților legate de turația motoarelor electrice, indiferent de tipul lor, este esențială pentru exploatarea eficientă și longevitatea acestora. Consultarea documentației tehnice specifice fiecărui vehicul sau utilaj este recomandată pentru a respecta limitele de funcționare optime.
tags: #turatia #si #sarcina #motorului